-
Május 20. - egy talán felhőmentes estén...
-
2018. május 20.
Meglepett a ma esti felhőmentes éjszaka. Remélem végig megmarad... Célpont az UGC 10214, egyike az ún. tadpole (ebihal) galaxisoknak. A Hubble űrtávcső képeiről ha valaki rákeres weben, biztosan beugrik melyik is ez a kifejezetten szokatlan, afféle szétzilált galaxis. Gondoltam egy rövid lerásban bemutatom, hogyan is működik nekem az ég alatti munka. Mindig csak a végeredmények kerülnek a galériákba, pedig az igazán izgalmas dolgok éjszaka történnek. A hobbi fél-élménye.
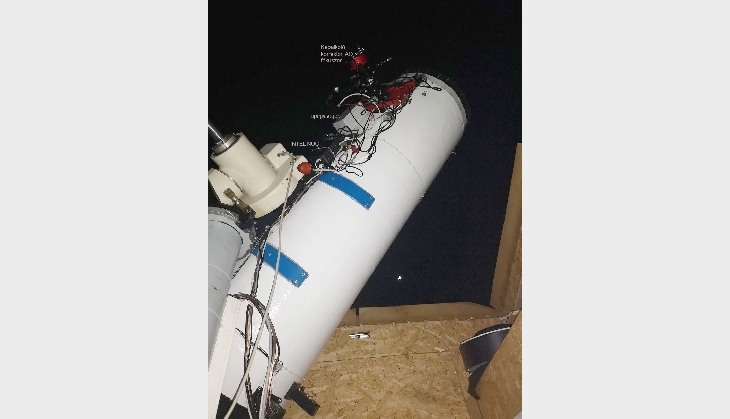
Kattintottam egy képet a távcsőről. Holdfényes éjszaka van, látszik is a Holdsarló a távcső alatt. A fotótémámtól talán kellően messze, de semmiképp nem szoktam örülni a plusz háttér fényességnek. De hátha meglesz így is az ebihal minden részlete...
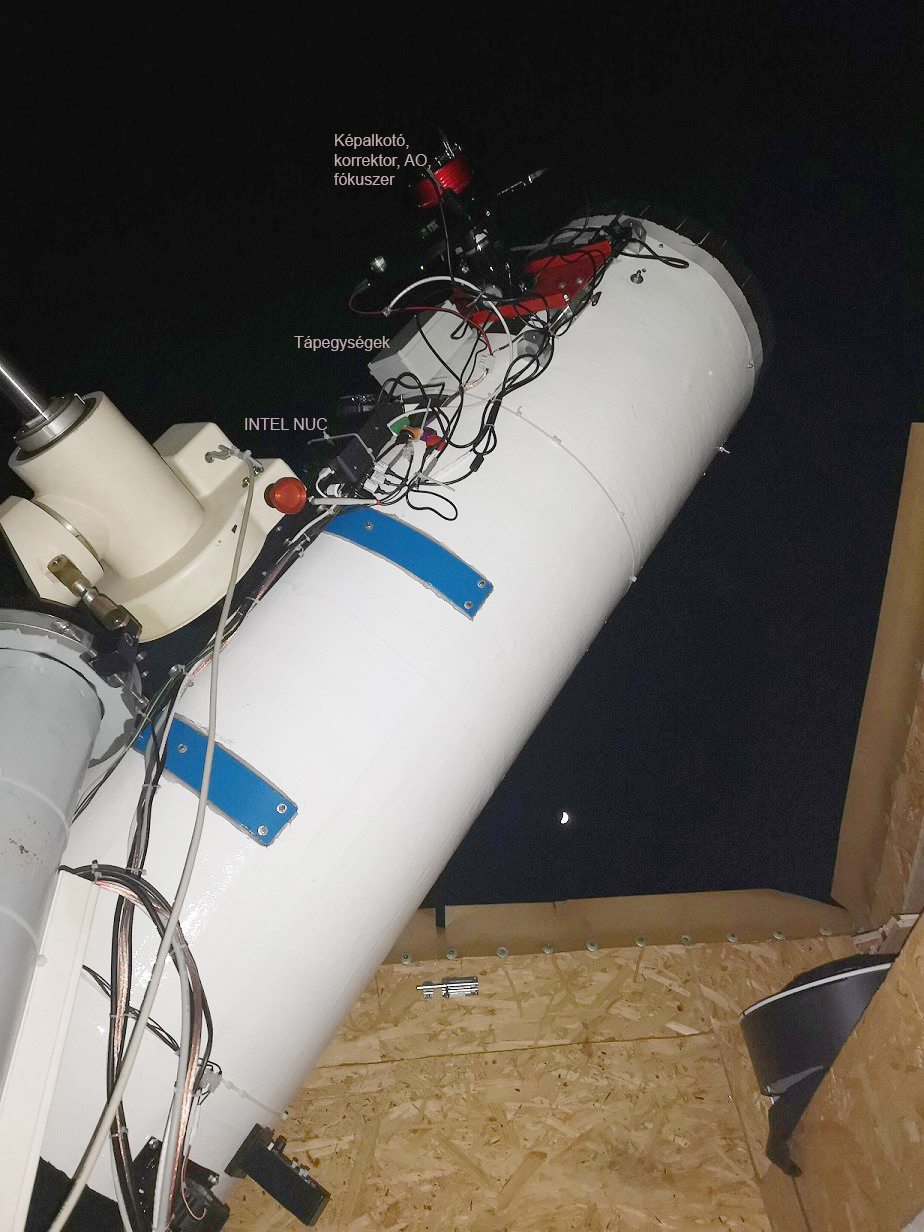
A mélyég képek leírásaiból maga az észlelő szett már ismerős, így nem kezdem ez az aljától a tetejéig lírni, mi is látható a képen. Ez a tejeje, a lényeg... Még nem egészítettem ki weblapomon az eszközöknél minden újítást, így vegyük sorra röviden miket és miért is jelöltem a képen.
INTEL NUC - Ez egy teljes értékű boxPC. Mindig is sok hibát generált a sok USB és egyéb csatolakozók miatt, amikor egy távcső alatti PC-t használtam fotózáshoz. Arról már nem is beszélve, legalább 5db aktív USB hosszabbítót kellett a távcsőről levezetnem. Ennek azért már kötegben az egyéb tápokkal együtt van vastagsága, sajnos mechanikán kívül tudtam csak lehozni, sokszor majdnem összenyomtam mozgatással, avagy beakasztottam egyes alkatrészekbe. Nézegettem a PrimaLuceLab Eagle PC megoldásait. Méregdrágák, főként ha valami nagyobb számítási teljesítményűt akarnánk beszerezni. Az aktív optika vezetéshez - leírások szerint - nem árt az izmosabb processzor. Beugrott egyszer, rákeresek a kockaPC-kre, vajon hol tart az áruk. Meglepődtem, jó értelemben, régen néztem már ezeket, egészen elfogadható árkategóriájuk lett. Kiválasztottam egy i7-es konfigot. Kompromisszumos ez a NUC persze, a benne lévő WIFI adapter sajnos nem elég stabil, az USB portok száma sem elég, de még így is tapasztalatom szerint jelentős üzembiztonságot sikerült nyernem. Nincsenek az aktív USB hubok jelen a rendszerben, a komponenseket közvetlenül, rövidített USB kábeleiken keresztül tudom csatlakoztatni. Annyira nem voltam azért bátor, hogy ne akasszak rá monitort sem, egy hosszabb HDMI kábelen keresztül a képe le van hozva asztalra, az egér és billentyűzet vezeték nélküli típus.
Tápegységek - Zárt dobozban foglalnak helyet a különféle egységek tápjai. Mehetnének egyetlen 12V-os tápról is, de tapasztaltam már ebből régebben bugokat. Nem teljesen értem miért, mivel ezek a mai kapcsolóüzemi tápok galvanikusan nincsenek leválasztva a hálózatról, így táp és táp között szivárgó 100V körüli feszültség megvan. érdekes eszközök ezek az asztro-cuccok, ha egy tápról hajtottam meg mindent (kamera, szűrőváltó, fókuszer, stb), akkor hibáztak működésben. Pedig annak inkább lett volna magyarázata, hogy stabilabbak, nincsenek potenciál különbségek. A teljesen közös negatív táp (a közös GND) valószínűleg nem ezeknek lett kitalálva. Hát igen, nem ipari elektronikák, szedett vedett megoldások vannak a panelokon tápoldalról. így minden ezsközhöz a saját tepegységét használom - már ha adtak hozzá - úgy tűnik hogy így mennek ezek jól. Ezeket régen egyenként rögzítettem a távcsőre, most kicsit a szépség jegyében kaptak egy közös műanyag dobozt. A tápegység vezetékeit itt is természetesen méretre vagdostam, mint az USB csatlakozókat, nem vagyok híve a feltekercselt, halomban álló vezetékeknek. Ugyan egyenáramról beszélünk tápoknál, de akkor is, ki tudja mik indukálódnak ott. Az USB vezetékei is hiába árnyékoltak, ott a magasabb frekvenicák miatt szerintem kerülni kell a hurkokat több eszköznél.
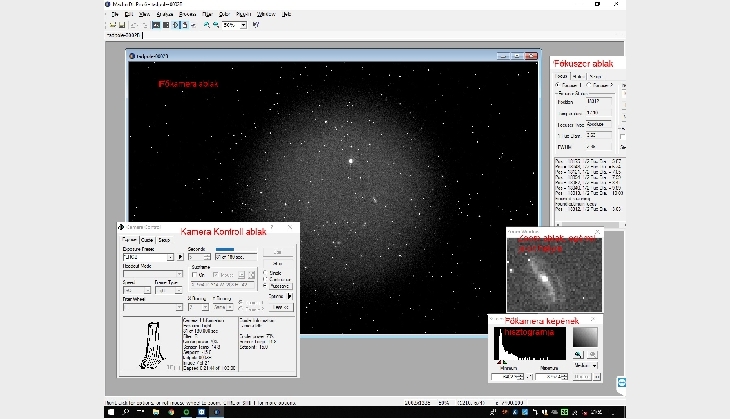
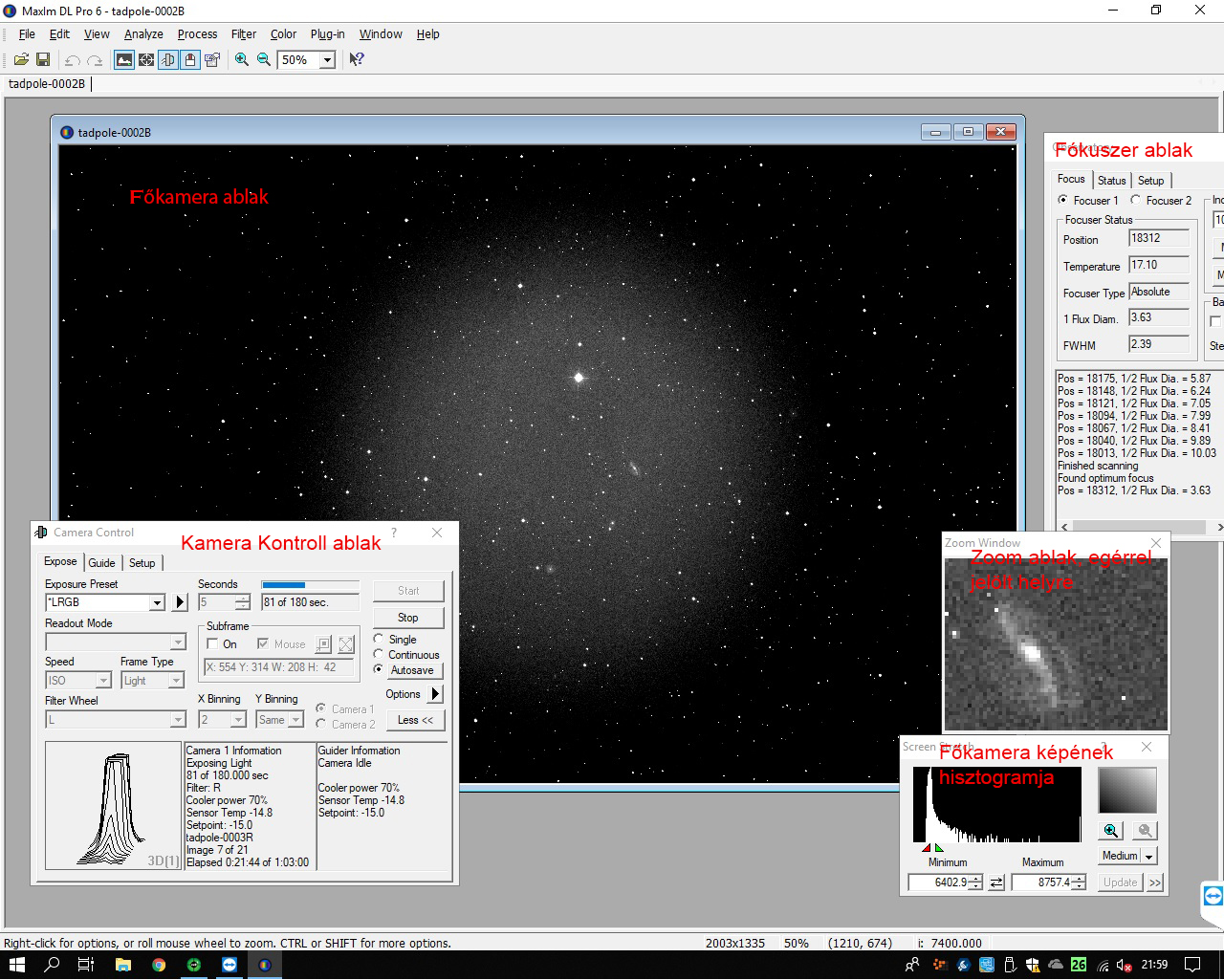
Maxim DL-t használok az Atik főkamera képkészítéséhez, a szekvenciák futtatásához. Kiegészítésképpen még a Maxim kezeli az automata fókuszálást, a fókuszmotrot is.
Az egyes szoftveres háttér műveletek miatt direkt elkülöntetten futtatom a főkamera vezérlést a többi periféria vezérlésétől. Nem tudom hogy ennek van e gyakorlati haszna, de nem is akarok ebbe különösebben belemenni, annyi biztos, hogy az asztro ezsközök vezérlései érdekes állatfajták, semmiképp sem a stabilitásukkal tudnám őket jellemezni. Ott van a háttérben egy csomó csatolófelület, szerintem jobb az egyes összetartozó perifériákat külön szoftverben kezelni. A Maxim DL alkalmas lenne a nálam működő összes periféria kezelésre, de nem tapasztaltam a sok emulált soros és USB eszközökben, driver-eikben akkora precizitást, hogy ezek eltárjék egymást. Régebben a vezetést is innét használtam, változatos időpontokban akadt össze az egész, és kellett újraindítgatni akár a PC-t is.
A főkamera ablakban a mindenkori utolsó expó képe látszik. Ehhez tartozik a jobb oldali lenti hisztogram segéd is, mellyel a fekete és a sötétpontot lehet igazítani. Természetesen a hisztogram állítása nem tesz hozzá és nem vesz el semmit a mentett nyersképből, csak képrenyő funkció. A képen az egeret mozgatva a Zoom ablakban látható beállított nagyítással a vizsgálni vágyott látómező darabka. Hasznos lehet pl. fókuszáltság ellenőrzésnél, nem kell a főképet nagyítgatni, csak egy csillagra vinni a kurzort. A Kamera kontroll ablakban láthatjuk a főkamera aktuális történéseit. Hol tart éppen az expó, a szekvenciából eddig mennyi készült el, kamera hőfok és Peltier áram adatok, szűrőváltó pozíciók vannak még itt. Próbaképhez itt lehet megadni ha Subframe-ben akarunk valamit vizsgálni. Ennek legfőbb haszna az, hogy nem kell a teljes expó kiolvasást végigvárni, a szenzorról csak a Subframe kerül kiolvasásra. Azért ez nem mellékes szempont, a szenzorom teljes kiolvasása fél perc körüli ideig tart. A Fókuszer ablak nem vesz részt az aktív képkészítésben. Amikor azt látjuk aktuális expókon, hogy kezd az élesség elmászni, akkor az expót és a vezetést leállítva ennek segítségével lehet egy automata FWHM és félérték fényesség értékekre fókuszáltatni. Kizárólag ezt használom fókuszálásra, egyrészt nagyon magasra kellene egy elég nagy Bahtinov maszkkal felmászogatnom, másrészt ennek bízom csak a pontosságában. Az egyes intra és extrafókuszált értékekből középre interpolált végeredmény biztosan pontos.
A Főkamera képen látható milyen szép vinyettálásom van, de ez jó flat-el teljesen eltűntethető. A vinyettálás értéke valahol 70 százalék körül mozog, ekkora fényveszteséget még simán lehet korrigálni. Egyébként is elég fényes Light képeket szoktam készíteni, az expóidőket így beállítani. Látható a lenti hisztogramon, a háttér értéke 5000 ADU körül van, holott a szenzorom kiolvasási zaja valahol 600 ADU körül mozog. Tapasztalatom szerint ez a háttér fényesség elegendő általában arra, hogy a fotonzaj jelenséget eléggé minimalizálni tudjam a halványabb részeken.
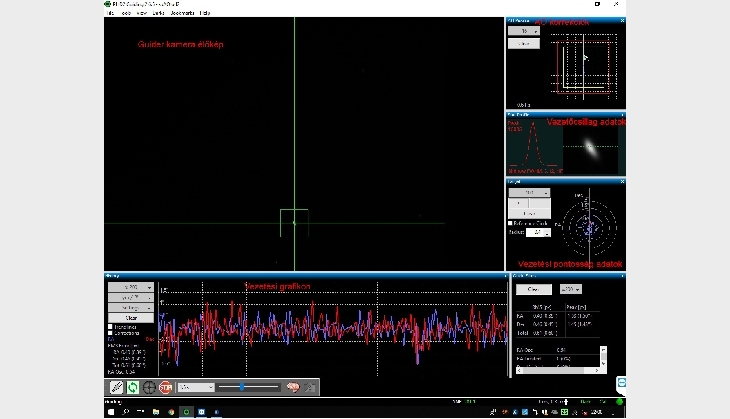
Nagyon perfekt vezető szoftvernek tartom a PHD2-t. Az adott mechanika-távcső párosításhoz nagyon finoman paraméterezhető, lényegesen jobban mint a Maxim DL, melyben szinte ehhez semmi sincs az aggresszivitáson és a hibahatáron kívül. Nem mellékesen a StarLight aktív optikámat is webes leíársok szerint ez kezeli a legjobban. Első körben az aktív optikát kalibrálja, majd a mechanikát, ha majd efféle korrekciókra is szükség lesz, meglegyen ez is.
A Guider kamera képét a lent beállított expó hosszonként frissítve látjuk. Itt választunk vezetőcsillagot. Az hogy itt ez az egyetlen látszik, az nem meglepő OAG-ot használó kollégák számára. A Tejútrendszer síkjából kifelé fotózok éppen, itt nincs olyan komoly számú vezetőcsillag zsongás, mint mondjuk a Tejútba fotózva. Alatta az aktuális vezetési pontosság látszik grafikonként, a visszamenőleges adatokat is látjuk. Erre most sajnos nem mondanám hogy húúdejó, dehát vannak most apróbb széllőkések, a nagyobb távcsövem sajnos nagyon jó vitorlaként funkcionál. Jobbra fent látható az aktív optika aktuális eltolás pozíciója. Mikor kihalad a sárga négyzetből a vezetőcsillag (bár itt inkább szebben mondva a vastagabb üveg ferdeséégnek mértékéről van szó) akkor elkezdi a rendszer a mechanika segítségével középre visszaterelni a vezetőcsillagok. Vagyis a vastag AO üveget merőleges helyzetbe visszahozni. Alatta a vezetőcsillag képe, és adatai. OAG-nál ezt ne várjuk kör alakúnak, egy efféle nyújtott formára kell vezetni, a korrektor külső részéből vesz mintát a kamera. A korrektoron itt már nem korrigált a látómező. Ami a vezetőcsillag fényességét illeti, ez éppen egy jól definiált, fényesebb, 1.5 másodperces expóidpkkel fényessége majdnem 17.000 ADU. Amikor nincs ilyen fényes csillag, valahol ennél a Lodestar X2 kameránál az 1.500 ADU értéke ad még elfogadható definiáltságú, vezetésre alkalmas csillagot, fényességet. Ezek alatt ott vannak a múltbéli adatok alapján az átlagos pontosság értékek, egyéb adatok, peak és átlag értékek.
Ejtsünk pár szót egy fontos dologról, a bolygatásról. Fontos a felvételek közötti bolygatás, bár sokáig - rendszer adta korlátok miatt - nem csináltam. Egyrészt persze a hot vagy a cool pixelek, esetleges porszem nyomok eltűntetésének egy jó módszere az átlagolás során, másrészt alapvetően fontos, ha később drizzle algoritmussal szeretnénk képünk felbontását növelni. Annó mikor nem használtam a PHD2-t, csak a Maxim DL-el vezettem. Ebben kellett volna a bolygatást beállítani. Ami első hallásra nem tűnik bonyolultnak, a leírásában is benne van, megvan a checkbox, hogy hogyan kellene ezt használni, bekapcsolni, élvezni... Igen ám, de az év végéig legfrissebb verziójában is volt egy kis baj ezzel, egész egyszerűen nem működött. Olvastam utána weben is, mindenféle buta praktikákkal, felvételek közötti felesleges hosszú időkkel paraméterezve, nagynehezen rábírható a Maxim a bolygatásra. De kinek van kedve egy 6 perces expó után még 3 perc késleltetést beállítani csak azért, hogy ez az egyébként triviláis dolog meglegyen. Bolygatást ugyan megcsinálja a szoftver, elviszi a vezetőcsillagról a mechanika segítségével, csak éppen a vezetőkamerán a következő vezetőcsillag hely nem frissül, visszadöcögteti a régi helyre. Szép.... Erre is megoldás lett a PHD2. A Maximot és a PHD2-t kell ehhez szinkronba hozni. Mivel a PHD2 vezet, innét megy ki a bolygatás korrekció jele, ezt akkor kell a MAximnak átadnia, amikor elkészült az expó. Azt viszont a Maxim oldaláról kell a PHD2 jelére bevárni, hogy mikor állt be a rendszer az új vezetőcsillag helyére. Ezeket a feladatokat nagyon jól megoldja a PhdTOmaxim szkript.
Akár meglesz javítva, vagy meg van javítva a Maxim DL-ben azóta ez a bolygatás funkció akár nem, soha azt nem használnám már erre. Sőt, egyenesen afféle szégyen, hogy egy ilyen összegbe kerülő szoftver esetében ez valamiért nem működik beépítetten.
Lehetne persze más rendszer szoftvereket is használni, ott van példaképp az APT, vagy éppen a SGpro nevű integrált megoldások. Viszont én ehhez a pároshoz szoktam hozzá, semmi értelmét és eredményét sem látom annak, hogy most tanuljak, vagy inkább mondjuk úgy megszokjak más szoftvert, vagy szoftver párost. Aki gyakorlóan használja ezen programokat, avagy a távcső körül több USB-s eszközt, vagy soros perifériákat, már eleve megérti miért mondom ezt: én már annak is örülök, ha egy adott éjszaka alatt nem szakad le vagy fagy le valami a rendszerben szoftverek oldaláról, nem elvárás a teljesen automata használat. Sajnos, még nem...
{kind=link}
{kind=link}
{kind=link}