-
M1 - sok éjszakás fotózás, kevés jó fotóval és sok szereléssel
-
2016. december 12.
Kétféle nyersanyag összegzése, az RGB színszűrős képek 458/1900 asztrográfommal készültek 2016. december 12-én, a Lumimancia kép egy 2013-as színes Canon sorozatról került le, melyet a 300/1200 asztrográfommal készítettem.
Azt gondolhatnánk, tulajdonképpen joggal, hogy felcseréltem a kép alatti leírást. Vajon miért készül éppen az RGB színszűrős anyag a szép nagy newton távcsővel és CCD kamerával, és miért pont a Luminancia, a "részlet-kép" készült régen, egy kisebb newton távcsővel, átalakított Canon géppel.
2016. év végén, november és december hónapokban nagyon sok éjszakán át forgattam a 458-as asztrográfomat a Rák ködre. Szerettem volna némi indíttatásból igen jó anyagot gyűjteni RGB-ben, és keskenysáv szűrőkkel is. Nem tudom pontosan, még nem számoltam össze mennyi éjszakán át készítettem különféle képeket. Majd lesz kidolgozott eredmény SHO-ban is, talán akkor kedvem lesz ennek - egyébként lényegtelen - a számnak az összeszámolásához is. Lényeg a lényeg, kezdett az M1 a "mumusom" lenni. Változatos hibák miatt nem akartak rendes képek készülni. Volt éjszaka, mikor végre indítottam az expókat, és befelhősödött az ég. Ha jól emlészem, ez az első éjszakákon így ment végig. Ez nem szokatlan dolog...
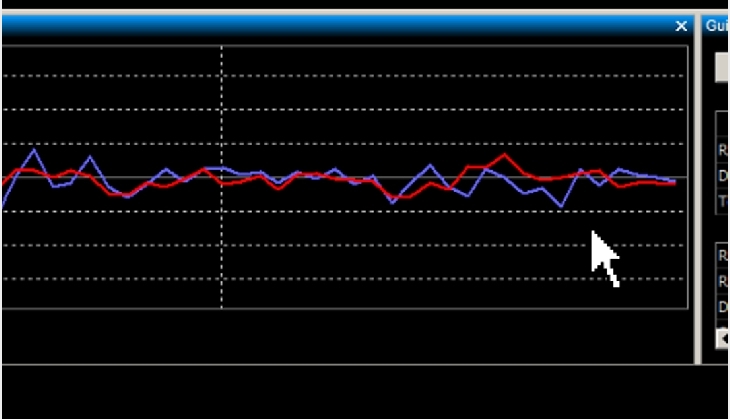
A grafikonon látható, +/- 1 pixeles pontosság között ugrál végig a vezetés. A középvonalhoz képest fel és le irányban a következő vonal mutatja az 1 pixeles kitérést. A vezető kamera egy Lodestar 2 típusú CCD, 8.2x8.4 mikron pixelmérettel, a főkamera Atik 11000, 9x9 mikron pixelmérettel. A vezető kamerán lévő eltérések tehát szinte egy az egyben leképezésre kerülnek a főkamerán is. Mivel átlagosan minden irányban van kóvájgás, így a csillagok ugyan kör alakúak lettek, de felbontást veszítettem a rossz vezetés miatt.
Sajnos ennek a tavaly év végi M1 sorozatnak minden elemén, minden kockáján végig ment ez a hiba. Utólagosan lehet orvosolni némiképp ezt PSF alapú dekonvolúcióval, de ez így is nagy hiba, komoly felbontás veszteség, nem lehet a digitális megoldásokkal ellensúlyozni, visszahozni. Természetesen nem hagyott nyugodni ez a jelenség. A Fornax100 rekta tengelyéhez hozzáfértem, álíltottam feszességet, újrazsíroztam, kiszereltem a csigát, csigakereket, de semmi eredmény. Nem láttam túl sok logikát benne, de gondoltam kipróbálok más vezető szoftvert, nézzük a phd2-t.
Elsőre sajnos itt is katasztrófális eredményt kaptam. Maga a szoftver nagyon tetszett, menet közben lehet nagyon sok mindent konfigurálni, melynek segítségével az adott körülményekre lehet optimalizálni a vezetés paramétereit. MaximDL-ben futás közben egyedül az aggresszivitást lehet csak állítani, phd2-ben szinte mindent. Aggresszivitáson túl a minimális és a maximális korrekciót is, a beavatkozás határértékeit, stb stb.
 Ez itt már a katasztrófa állapot valamikor december végéről...
Ez itt már a katasztrófa állapot valamikor december végéről...Egyazon éjszakán készültek a fenti képernyő képek a szétesett vezetésemről. Felső képen a hibák már a +/- 1,5 pixel környékén járnak, az alsó képről már nem is írnék semmit, nem kell magyarázni. A kalibrációk egyre rosszabbak lettek, de semmi mechanikus hibát nem találtam sem ezen éjszaka előtt, sem ezen az éjjelen, vakoskodva a távcső és a mechanika körül.
Bevillant valami, hátha esetleg a vezető kamera guide st4 kimenetével lehet valami, avagy a kábel hibás, esetleg valamely csatlakozás még mindig nem lenne rendben a többszöri kontakt spray-s kezelés ellenére sem.A mechanika vezérlőjét még soha nem kötöttem össze a csillagda PC-vel. úgy értem, fotózás közben. Eljött ennek is az ideje, először az MC3konfig-ot próbáltam értékekben igazgatni, persze ez sem vezetett eredményre. Hosszas próbálkozás ez, többféle paraméter, motoráram állítgatása után volt hogy lefutott a kalibráció rendben, kb. visszatért a vezetőcsillag a kiindulási helyére, de éles vezetés közben rendre az derült ki, valami hiba még van a rendszerben.
Elkezdtem weben keresgélni, miféle protokoll és Ascom driver kell a mechanika géphez csatolásához. Elsőre persze ez sem megy, de másodoikra megvan.... A phd2-t beállítottam úgy, hogy ne a vezetőkamera kimenete alapján, guide porton menjenek a vezető korrekciós jelek, hanem a mechanikát vezérelje a szoftver. Régi módszer, de bevállt! (kellett még az, hogy a valószínűleg valahol zárlatos st4 kábelt kihúzzam az MC3-ból és a guide kamerából is)
Elsőre pontos kalibrációt kaptam, a vezetőcsillag pontosan visszatért a kiindulási helyre. Ez előtt látható volt, hoyg amikor a rekta tengelyre menne a kalibrálás, néha megmozdult a deklináció tengely is.
Mechanikán vezetve, és a zárlatos, hibás st4 kábelek kihúzgálása után minden helyreállt.
 Ez a görbe ment perceken keresztül végre, fantasztikum...
Ez a görbe ment perceken keresztül végre, fantasztikum...El tudnék képzelni ettől korrektebb pontosságú vezetést is, de az előzőekhez mérten az már egy szuper eredmény. A csúcsok ugyan megmaradtak, de a kilengés sokkal ritkább, és kisebb mértékű. átlagban ez már valahol +/- 0,5 pixel körül van, nagyon örültem neki, hogy megvan a mumus hiba.
Ennyit dióhéjban a mumus faktorról. Ez a fajta hiba sorozat volt az oka annak, hogy egy jól sikerült RGB képet sem tudtam készíteni az M1-ről ezen a sorozaton belül. Régebbi, még 2013-as képem alapanyaga sajnos már nem volt meg, csak egy sztekkelt kép. Annak a képnek a geometriája rendben volt, azt a részletességet adta, mely végül is már akkor is tetszett. A sztekkel kép színei viszont még egy igen kezdetleges, rossz WB-s kidolgozás nyomait viselték. Gondoltam tehát, használom azon képet Luminanciaként, a CCD-s friss kép RGB aránya, a készült képek száma megfelelő volt, ezt használom a színréteghez. Ebből az öszvér megoldásból született a fenti kép. Egy kép (LRGB) luminanciája egyébként a részleteket, fényesség értékeket határozza meg, ez egy szürkeskálás kép kell legyen, a fotó végleges megjelenésére alapvető hatása van ezen kép minőségének.
Ezzel a félkarú rabló, vezetéshibás szettel még az sorozat elején, nem annyira rossz minőségű, és nem annyira szétesett vezetés mellett sikerült azért keskenysávos képeket is csinálni. A sok felhős éjszaka azért ezek számát is csökkentette, a vastagodó pára miatt kellett szelektálnom kockákat, de talonban van egy egészen jó sorozat. Egy éjszaka elején, legelső próbálkozásnál készült 3-3db SII-Ha-OIII frame-ből azért csak kíváncsi voltam mi fog kijönni, kidolgoztam ezt a lenti SHO képet.
 M1 - SHO
M1 - SHOEz csak afféle skicckép, pihen még legalább háromszor ennyi, viszonylag pontosan vezetett kocka. Arra ez a kép is jó illusztráció, hogy ha sikerült volna az M1 sorozatot rendesen, hibáktól mentesen végig fotózni, igen jó RGB és SHO alapanyag, jó sok frame került volna a háttértárra.
Nem teljesen érzem úgy, hogy ezt az objektumot már velejéig kifotóztam, leészleltem volna. Lesz még biztosan visszatérés rá.Ami az M1 projektben - ha lehet így mondani - a legjobban tetszett, az egy érdekes próbálkozás, polárszűrő segítségével egy rövid sorozat, melynek eredményeként sikerült elcsípni a szinkrotron sugárzás nyomát, a mágneses erővonalak indikációját az ködben. Ez lesz a következő kidolgozandó kép, az M1 mágneses mezejének kavargása, RGB kép színtérben.